TomTom:提供AI導航、地圖、位置技術解決方案
TomTom是一家致力於提供AI導航、地圖和位置技術解決方案的公司。其產品和服務可為駕車者、企業客戶和開發者提供所需的地圖、實時交通、路線規劃等服務,助力出行和商業運營。
TomTom是一家致力於提供AI導航、地圖和位置技術解決方案的公司。其產品和服務可為駕車者、企業客戶和開發者提供所需的地圖、實時交通、路線規劃等服務,助力出行和商業運營。
Android Auto是一款車載智慧系統,它可以將Android手機與汽車內建顯示屏連線,從而在開車時透過汽車內建顯示屏使用Android手機的功能和應用程式,如導航、音樂、通訊等,可以有效減少駕駛時的注意力分散,提高駕駛安全性。
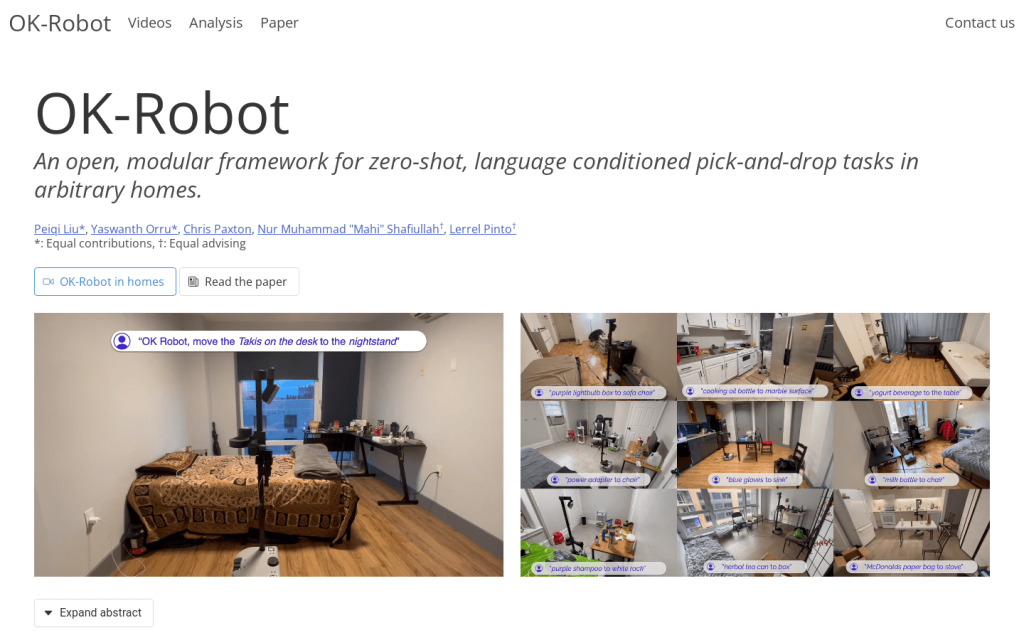
OK-Robot是一個開放的模組化框架,實現了在任意家居環境下根據語言指令進行零樣本物品搬運任務。該框架採用了模組化設計,使用3D VoxelMap進行開放詞彙的導航,AnyGrasp和LangSam進行開放詞彙的抓取,以及放置原語進行物品放置。框架不需要預先訓練,可以實現語言指令的零樣本泛化。
Cata – Question Navigator是一個便捷的側邊欄工具,可以快速導航和組織聊天會話中的問題。它提供了一個便捷的導航欄,可以幫助使用者快速查詢和瀏覽問題,並進行組織和標記。