DexCap:可伸縮便攜運動捕捉資料收集系統
DexCap是一種便攜手部動作捕捉系統,結合了全息測距和電磁場技術,提供準確、抗遮擋的手腕和手指運動跟蹤,並透過對環境的3D觀測進行資料採集。DexIL演算法利用逆運動學和基於點雲的模仿學習,直接從人類手部動作資料中訓練靈巧的機器手技能。系統支援選項的人機協同校正機制,利用這一豐富資料集,機器手能夠複製人類動作,還能根據人類手動作進一步提高表現。
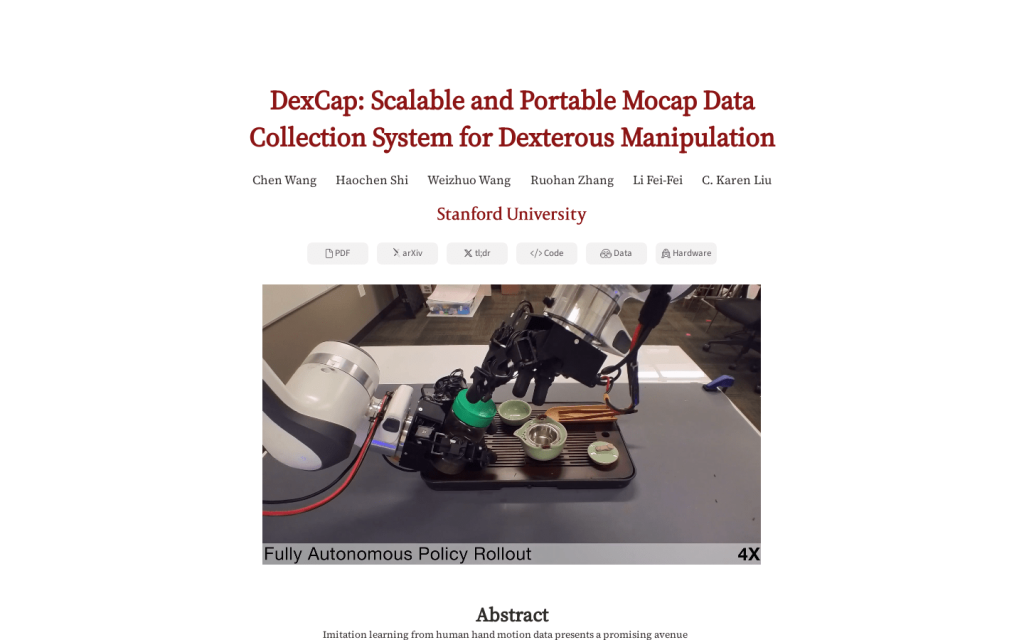
DexCap是一種便攜手部動作捕捉系統,結合了全息測距和電磁場技術,提供準確、抗遮擋的手腕和手指運動跟蹤,並透過對環境的3D觀測進行資料採集。DexIL演算法利用逆運動學和基於點雲的模仿學習,直接從人類手部動作資料中訓練靈巧的機器手技能。系統支援選項的人機協同校正機制,利用這一豐富資料集,機器手能夠複製人類動作,還能根據人類手動作進一步提高表現。
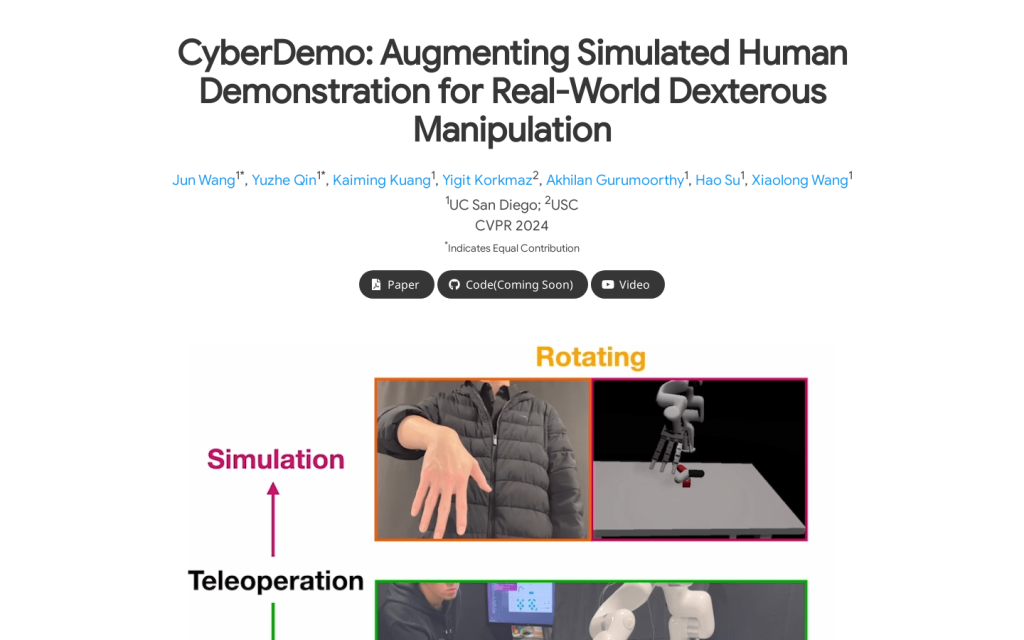
CyberDemo是一個旨在透過模擬人類演示來增強現實世界中靈巧操作的專案。它可能涉及到機器人技術、機器學習和模擬環境的結合,以提高機器人在複雜環境中的操作能力。