Link:ok-robot
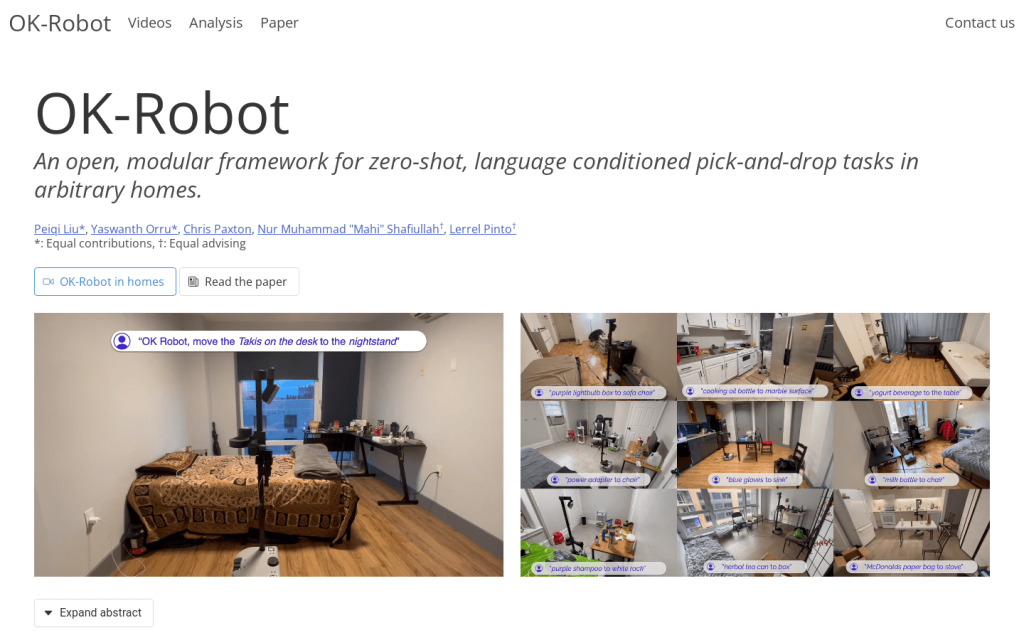
OK-Robot是一個開放的模組化框架,實現了在任意家居環境下根據語言指令進行零樣本物品搬運任務。該框架採用了模組化設計,使用3D VoxelMap進行開放詞彙的導航,AnyGrasp和LangSam進行開放詞彙的抓取,以及放置原語進行物品放置。框架不需要預先訓練,可以實現語言指令的零樣本泛化。
需求人群:
"家居服務機器人,實現搬運物品等家務輔助功能"
使用場景示例:
把紅色的橄欖油瓶從桌子上拿到冰箱
把遙控器從沙發移到茶几上
把蘋果從果盤中取出來拿到廚房
產品特色:
開放詞彙的導航系統
開放詞彙的抓取系統
放置物品的原語系統
模組化設計,容易擴充套件
零樣本泛化,無需預訓練