DINOv2:無監督學習的穩健視覺特徵
DINOv2 是一種無監督學習的自我監督學習方法,可以生成高效能的視覺特徵,適用於計算機視覺任務。它不需要微調,具有穩健性和跨領域效能。

ObjectDrop是一種監督方法,旨在實現照片級真實的物體刪除和插入。它利用了一個計數事實資料集和自助監督技術。主要功能是可以從影象中移除物體及其對場景產生的影響(如遮擋、陰影和反射),也能夠將物體以極其逼真的方式插入影象。它透過在一個小型的專門捕獲的資料集上微調擴散模型來實現物體刪除,而對於物體插入,它採用自助監督方式利用刪除模型合成大規模的計數事實資料集,在此資料集上訓練後再微調到真實資料集,從而獲得高質量的插入模型。相比之前的方法,ObjectDrop在物體刪除和插入的真實性上有了顯著提升。
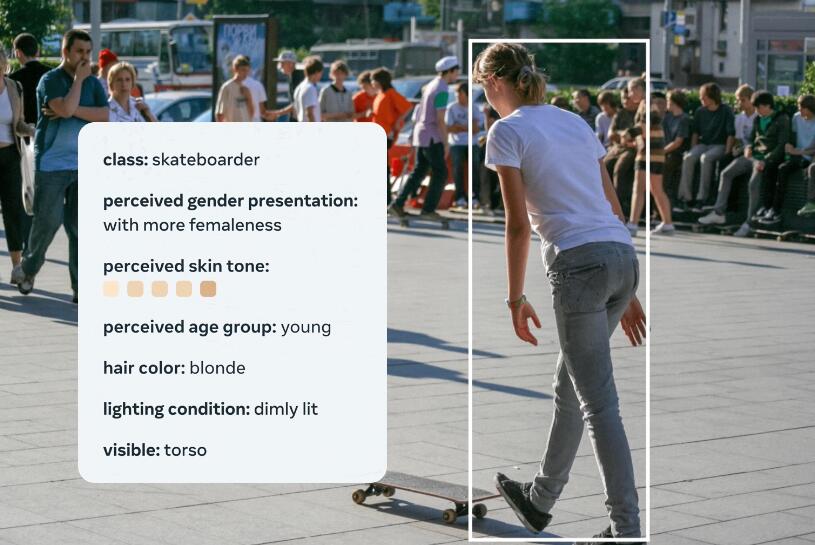
YOLO-NAS Pose是一款免費的、開源的庫,用於訓練基於PyTorch的計算機視覺模型。它提供了訓練指令碼和快速簡單複製模型結果的示例。內建SOTA模型,可以輕鬆載入和微調生產就緒的預訓練模型,包括最佳實踐和驗證的超引數,以實現最佳的準確性。可以縮短訓練生命週期,消除不確定性。提供分類、檢測、分割等不同任務的模型,可以輕鬆整合到程式碼庫中。
DUSt3R是一種新穎的密集和無約束立體3D重建方法,適用於任意影象集合。它不需要事先瞭解相機校準或視點姿態資訊,透過將成對重建問題視為點圖的迴歸,放寬了傳統投影相機模型的嚴格約束。DUSt3R提供了一種統一的單目和雙目重建方法,並在多影象情況下提出了一種簡單有效的全域性對齊策略。基於標準的Transformer編碼器和解碼器構建網路架構,利用強大的預訓練模型。DUSt3R直接提供場景的3D模型和深度資訊,並且可以從中恢復畫素匹配、相對和絕對相機資訊。

Wrestling Endurance Challenge是一個結合了人工智慧和計算機視覺的摔跤耐力挑戰應用。該應用透過AI分配任務,利用計算機視覺檢測使用者的持續時間。使用者可透過揚聲器或耳機接收指令,以參與耐力挑戰。應用使用持續的機器學習在雲端進行計算,並保證隱私安全,不會傳送影片,僅匯出關節座標和軌跡資料。

華為開源自研AI框架MindSpore。自動微分、並行加持,一次訓練,可多場景部署。支援端邊雲全場景的深度學習訓練推理框架,主要應用於計算機視覺、自然語言處理等AI領域,面向資料科學家、演演算法工程師等人群。主要具備基於原始碼轉換的通用自動微分、自動實現分散式並行訓練、資料處理、以及圖執行引擎等功能特性。藉助自動微分,輕鬆訓練神經網路。框架開源,華為培育AI開發生態。
navan.ai是一款無程式碼計算機視覺平臺,幫助企業、開發者和學生快速構建和訓練計算機視覺模型。無需編寫程式碼,只需上傳圖片即可在幾分鐘內構建和訓練模型。使用者可以在nStudio中快速測試模型效能,並透過下載模型檔案或使用API部署模型。navan.ai注重資料隱私,使用者可以使用自己的資料進行模型訓練,無需與平臺共享資料。未來,使用者還可以在navan.ai上將自己的計算機視覺模型進行商業化,為其他開發者提供使用,並從中獲得收益。
Roboflow是一個用於構建和部署計算機視覺模型的綜合平臺。它被超過25萬名工程師使用,用於建立資料集、訓練模型和部署到生產環境。Roboflow使您只需幾十個示例影象,即可在不到24小時內訓練一個工作的最新計算機視覺模型。它提供了資料集管理、標註工具、模型訓練、模型部署等一系列功能,並支援與各種環境和工具的整合。
OpenCV是一個實時最佳化的計算機視覺庫,提供了一套功能強大的工具和硬體支援。它還支援機器學習(ML)和人工智慧(AI)模型的執行。OpenCV是開源的,免費商用。